在这篇文章中,我们将探讨如何利用EtherCAT运动控制卡ECI2828以及LabVIEW软件进行智能设备的开发。首先,我们会介绍ECI2828硬件特性,以及它在物流系统中的应用场景。接着,文章会详细解释LabVIEW中的轴参数设置,并展示如何通过ZDevelop软件编辑和调试初始化文件。此外,文中还将提供一个简单的总线初始化示例代码,以帮助读者更好地理解整个过程。
ECIS2828硬件介绍
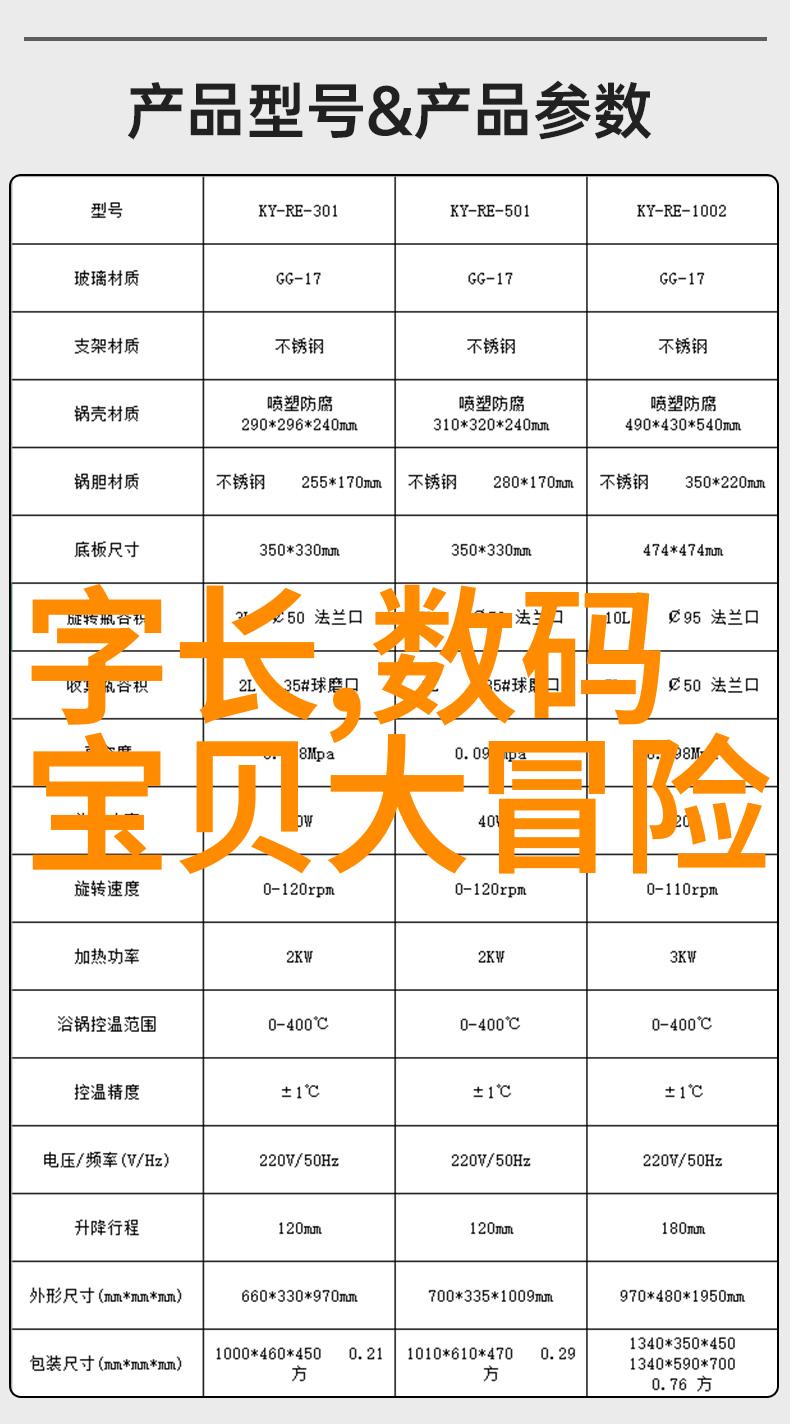
ECI2828是一款高性能的运动控制卡,它支持直线插补、圆弧插补、空间圆弧插补、螺旋插补等多种复杂运动模式。此外,该卡具备优化网络通讯协议,可以实现实时运动控制。用户可以通过以太网、232接口与电脑连接,并通过EtherCAT或CAN总线扩展输入输出点数或运动轴。

LabVIEW基本轴参数介绍
在使用LabVIEW进行运动控制之前,你需要了解几个关键的轴参数:
ATYPE:指定轴功能类型,只能选择该轴支持的特性。

UNITS:设置脉冲当量,即每单位时间发送多少脉冲。
ACCEL 和 DECEL:分别为加速度和减速度,单位为units/s/s。

SPEED:设定最大允许速度,单位为units/s。
这些参数对于确保精确和平滑的动作是至关重要的。在实际应用中,一般建议在开始移动前设置好加速和减速,以避免突然变速引起的问题。
总线初始化文件准备
为了配置并启动ECAT总线,你需要创建一个包含“ECAT初始化.bas”文件的地面项目。这是一个预定义好的脚本,可以用来扫描连接到总线上的所有节点,并映射它们到对应于计算机上的逻辑端口。你可以直接修改这个脚本来适应你的具体需求。
LabVIEW编程基础
最后,让我们简要概述一下使用LabVIEW进行编程的一般步骤:
创建一个新的VI(虚拟仪器)项目。
使用图形界面设计算法,而不是传统的文字代码编写方式。
利用数据流图(Data Flow Diagrams)表示程序执行顺序。
在运行时,将数据从源对象传递到目的对象,这些对象可能包括控件、指标、函数等组成部分。
这种基于图形界面的方法使得即使对于不熟悉编程语言的人也能够轻松构建复杂程序。而且,由于其高度可视化设计风格,使得调试过程变得更加直观易懂。