在我之前的叙述中,我们探讨了无刷直流电机(BLDC)的工作原理以及它如何被三相H桥逆变器驱动。我们了解到,为了保护逆变器级和电机本身免受过流损害,必须实现绕组过流保护。在这一过程中,我提到了使用直流母线电流来检测绕组电流,并通过感测直流母线电流量来控制峰值电流限制控制。
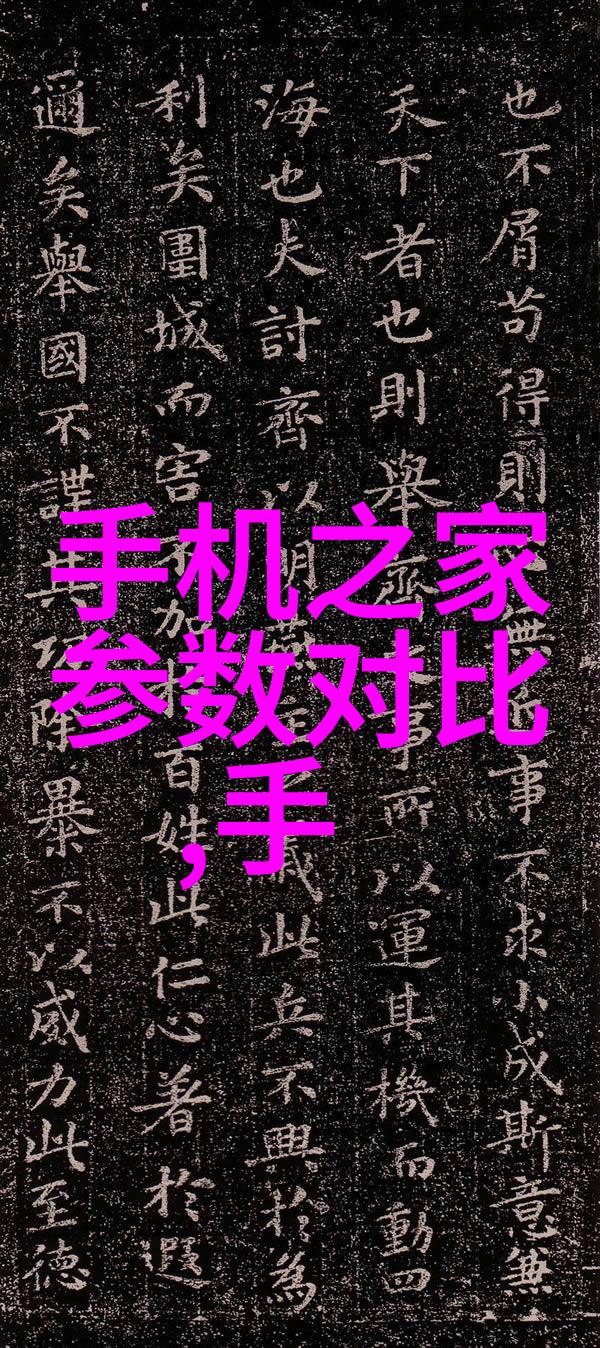
让我进一步解释这一点:在BLDC机的梯形控制期间,只有两个逆变器支路处于活动状态并为电机供电。这意味着我们可以通过感测直 流母线返回处放置的一个低成本检测阻抗器来测量绕组的交流当前,如图1所示。
对于单极二象限驱动,我们仅将脉宽调制(PWM)应用于一个有源桥臂的高侧开关。在整个60度换向周期期间,另一个有源腿的低侧开关保持打开状态。当顶部开关打开时,两相绕组通 电;当顶部和底部开关都打开时,直 流母线与绕组当前相同。因此,当顶部 PWM 为低平时,从而关闭顶部开关,而底部保持打开,即续行期间,不会有任何额外的直接从直 流母线上增加或减少,因此继续读取零值。

从我的解释中,可以看出通过监控直 流母线上的交流当前,就能提供对BLDC系统进行有效管理以避免过载情况发生。这样做不仅能够降低成本,而且也能确保系统运行效率更高。此外,这种方法还使得设计更加灵活,因为它允许对标称操作条件下的峰值当前进行优化,而不是考虑失速条件下的最高可能值。这一策略尤其适用于那些拥有较高绝缘阻力且具有较短退磁时间永久磁铁材料特性的BLDC驱动系统,它们可以承受更长时间内运行在超标称功率下而不会导致退磁问题的情况下。此外,还需要注意的是,在实际应用中,由于环境温度、风速等因素会影响到设备性能,所以最好是根据具体情况调整设置,以保证设备安全稳定运行。